ТОР 5 статей:
Методические подходы к анализу финансового состояния предприятия
Проблема периодизации русской литературы ХХ века. Краткая характеристика второй половины ХХ века
Характеристика шлифовальных кругов и ее маркировка
Служебные части речи. Предлог. Союз. Частицы
КАТЕГОРИИ:
- Археология
- Архитектура
- Астрономия
- Аудит
- Биология
- Ботаника
- Бухгалтерский учёт
- Войное дело
- Генетика
- География
- Геология
- Дизайн
- Искусство
- История
- Кино
- Кулинария
- Культура
- Литература
- Математика
- Медицина
- Металлургия
- Мифология
- Музыка
- Психология
- Религия
- Спорт
- Строительство
- Техника
- Транспорт
- Туризм
- Усадьба
- Физика
- Фотография
- Химия
- Экология
- Электричество
- Электроника
- Энергетика
ПОТЕНЦИАЛЬНАЯ ЭНЕРГИЯ.
Потенциальная энергия – это энергии взаимодействия тел. Потенциальная энергия вводится только для сил, работа которых не зависит от траектории движения тела и определяется только начальным и конечным положениями. Взаимодействие тел осуществляется через силовые поля. Тело в потенциальном поле имеет энергию Wn.. Работа при малом изменении конфигурации системы равна приращению потенциальной энергии (со знаком минус), поскольку она совершается за счет убыли потенциальной энергии:
dA = - dWn. (7.12).
dA это скалярное произведение силы F на перемещение dr:
Fdr=- dWn. (7.13).
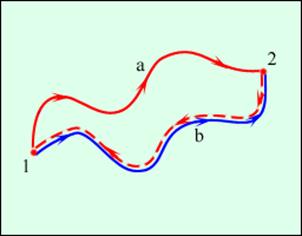
|
| Рис. 52. Работа консервативной силы A1a2 = A1b2. Работа на замкнутой траектории A = A1a2 + A2b1 = A1a2 – A1b2 = 0. |
Отсюда сила F по модулю и направлению
F=-dWn/dr, (7.14).
а потенциальная энергия
Wn=- òFdr+C, (7.15).
где С - постоянная интегрирования, т.е. потенциальная энергия определяется с точностью до постоянной. Для консервативных сил
Fx = - dWn/dx, Fy = - dWn/dy, Fz = - dWn/dz, F = -gradWn. (7.16).
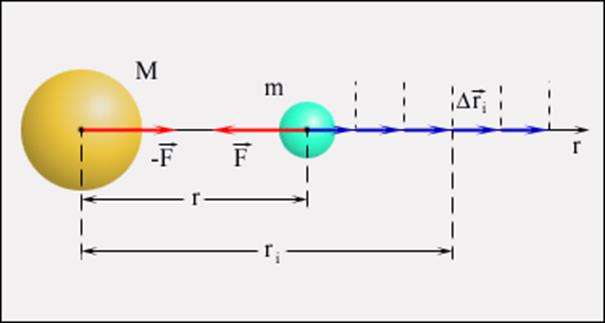
| Рис.53..Вычисление потенциальной энергии тела в гравитационном поле. |
Конкретный вид функции Wn зависит от характера поля. Так потенциальная энергия тела массой m на высоте h над Землей
Wn = mgh, (7.17).
где высота h отсчитывается от нулевого уровня, на котором Wn = 0.
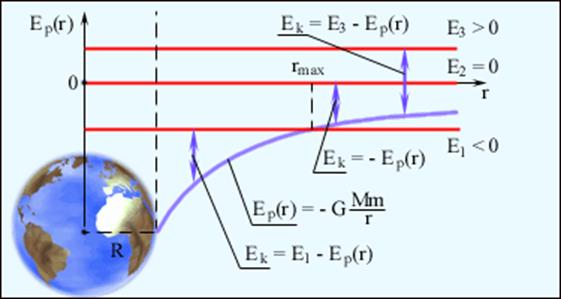
|
| Рис. 54. Диаграмма энергий тела массой m в гравитационном поле, создаваемом сферически симметричным телом массой M и радиусом R. |
Для упруго деформированного тела сила упругости пропорциональна величине деформации Fупр = - kx, (7.18).
где k - коэффициент упругости. По третьему закону Ньютона,
Fдеф= - Fупр = kx. (7.19).
Работа dA, совершаемая силой Fдеф, при малой деформации dx,
dA = Fдефdx = kxdx, (7.20).
а полная работа A = òkxdx = kòxdx = (kx2)/2 (7.21).
идет на увеличение потенциальной энергии деформированного тела,
Wn = (kx2)/2. (7.22).
На тело вблизи поверхности Земли, действует сила тяжести
F = mg. (7.23).
Работу силы тяжести можно записать в проекциях вектора перемещения Δs на ось OY, направленную вертикально вверх:
A = FTΔscosά = mgΔsv. (7.24).
Где FT = F Tv = - mg. (7.25).
– проекция силы тяжести, Δsv. – проекция вектора перемещения. При подъеме тела вверх сила тяжести совершает отрицательную работу, так как Δsv.> 0. Если тело переместилось из точки, расположенной на высоте h1, в точку, расположенную на высоте h2 от начала координатной оси OY, то сила тяжести совершила работу
A = - mg(h2 – h1) = - - (mgh2 – mgh1). (7.26).
Эта работа равна изменению mgh, взятому с противоположным знаком. Эту величину называют потенциальной энергией тела в поле силы тяжести
Wp = mgh. (7.27).
Она равна работе, которую совершает сила тяжести при опускании тела на нулевой уровень. Потенциальная энергия Wp зависит от выбора начала координат оси OY. Физический смысл имеет не сама потенциальная энергия, а ее изменение ΔWp = (Wp2 – Wp1). (7.28).
Это изменение не зависит от выбора нулевого уровня. Понятие потенциальной энергии справедливо и для упругой силы. Работа равна работе внешней силы A, взятой с противоположным знаком.
Aупр. = - A = -(kx2/2). (7.29).
Где k – жесткость пружины. Потенциальной энергией упруго деформированного тела называют величину Wp = (kx2/2). (7.30).
Не нашли, что искали? Воспользуйтесь поиском: